


- A+
所属分类:综合
课程介绍:
即时定位与地图构建,被很多学者认为是实现真正全自主移动机器人的关键。直白地讲,SLAM指的是当某种设备(如机器人、VR设备等)来到一个完全陌生的环境时,它需要精准地建立时间和空间的对应关系,并能完美地回答以下一系列问题:我刚才在哪里,现在在哪里?我看到了什么,现在看到的和之前看到的有哪些异同?我过去的行走轨迹是什么?我现在看到的世界是什么样子,和过去相比有怎样的变化?我的轨迹抖吗,我的位置飘吗?我还能跟踪到自己的轨迹吗,如果我丢了应该怎么办?我过去建立的对世界的认识还有用吗?我能在已有世界的抽象里快速对我现在的位置进行定位吗?

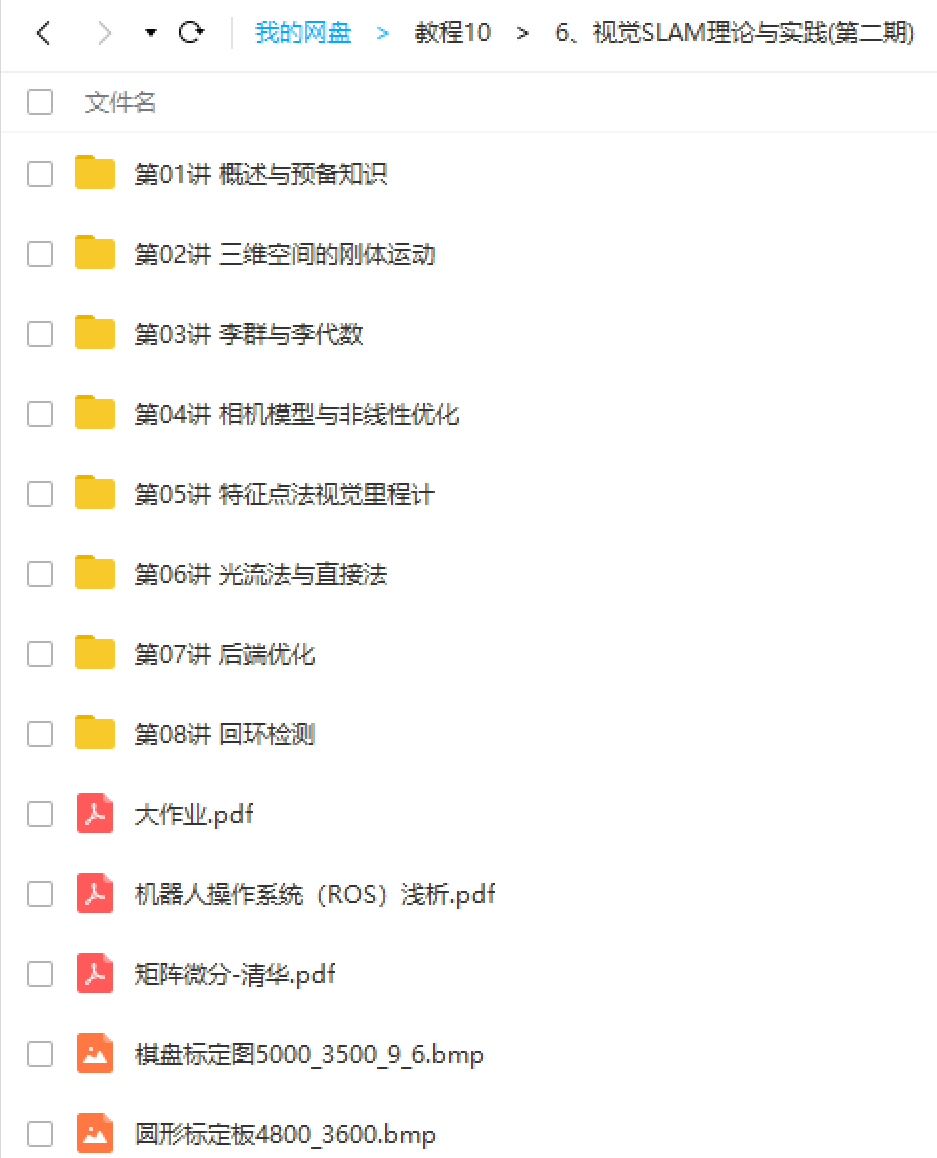
课程截图:

2019年8月29日 下午8:47 沙发
失效了